Braich Robot Cydweithredol Rhyddid 6-Echel Agv Deallus ar gyfer Paledu


Braich Robot Cydweithredol Rhyddid 6-Echel Agv Deallus ar gyfer Paledu
Prif Gategori
AGV AMR / codi jac i fyny AGV AMR / cerbyd tywys awtomatig AGV / robot symudol ymreolaethol AMR / car AGV AMR ar gyfer trin deunyddiau diwydiannol / gwneuthurwr Tsieina robot AGV / warws AMR / codi jac i fyny AMR laser llywio SLAM / robot symudol AGV AMR / siasi AGV AMR laser llywio SLAM / robot logisteg deallus
Cais

Siasi Di-griw Cyfres AMB Mae AMB (Auto Mobile Base) ar gyfer cerbydau ymreolus agv, siasi cyffredinol a gynlluniwyd ar gyfer cerbydau tywys ymreolus agv, yn darparu rhai nodweddion megis golygu mapiau a llywio lleoleiddio. Mae'r siasi di-griw hwn ar gyfer cart agv yn darparu rhyngwynebau helaeth megis I/O a CAN i osod amrywiol fodiwlau uchaf ynghyd â meddalwedd cleient pwerus a systemau dosbarthu i helpu defnyddwyr i gwblhau gweithgynhyrchu a chymhwyso cerbydau ymreolus agv yn gyflym. Mae pedwar twll mowntio ar ben siasi di-griw cyfres AMB ar gyfer cerbydau tywys ymreolus agv, sy'n cefnogi ehangu mympwyol gyda jacio, rholeri, trinwyr, tyniant cudd, arddangosfa, ac ati i gyflawni cymwysiadau lluosog o un siasi. Gall AMB ynghyd â SEER Enterprise Enhanced Digitalization wireddu dosbarthu a defnyddio unedig cannoedd o gynhyrchion AMB ar yr un pryd, sy'n gwella lefel ddeallus logisteg a chludiant mewnol yn y ffatri yn fawr.
Nodwedd
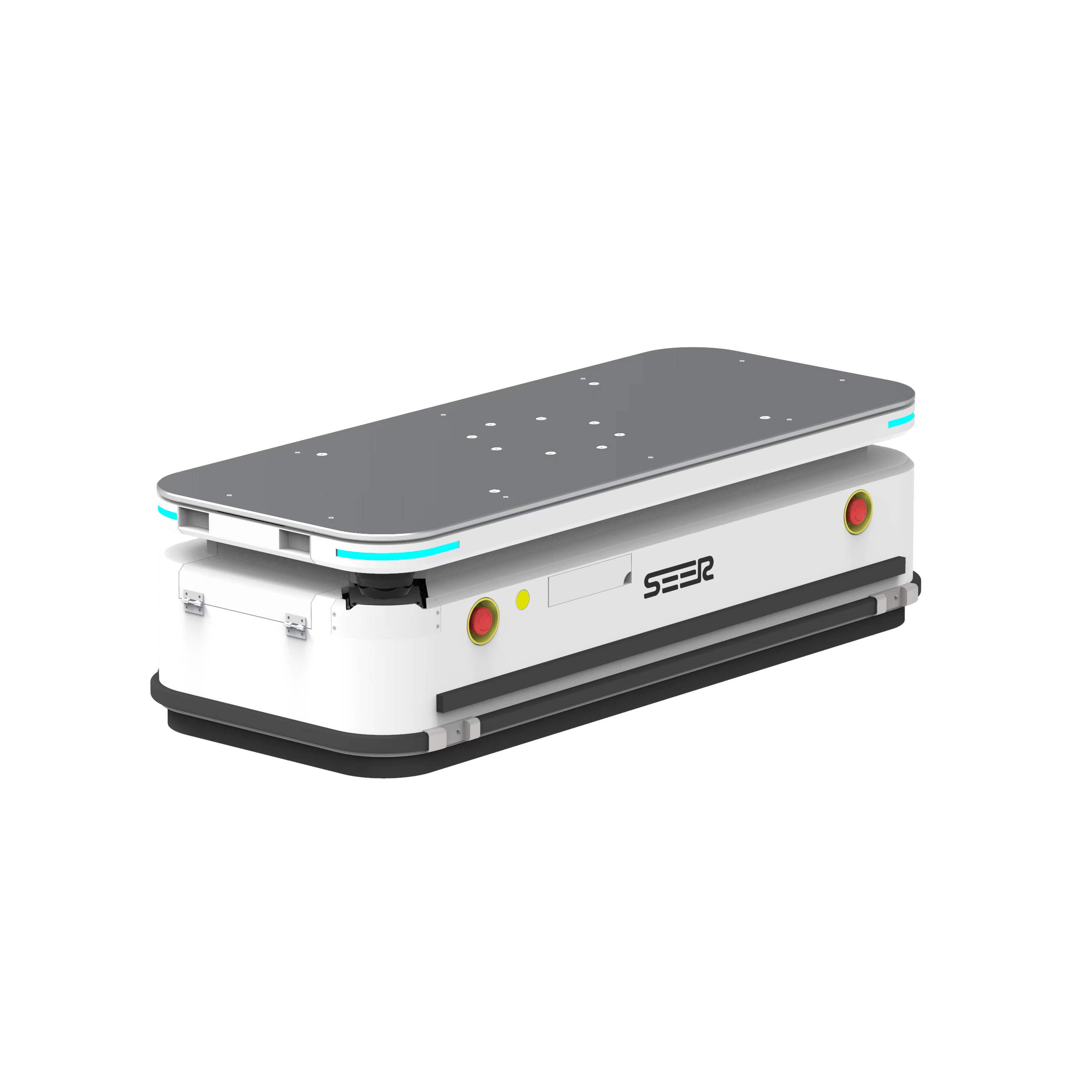
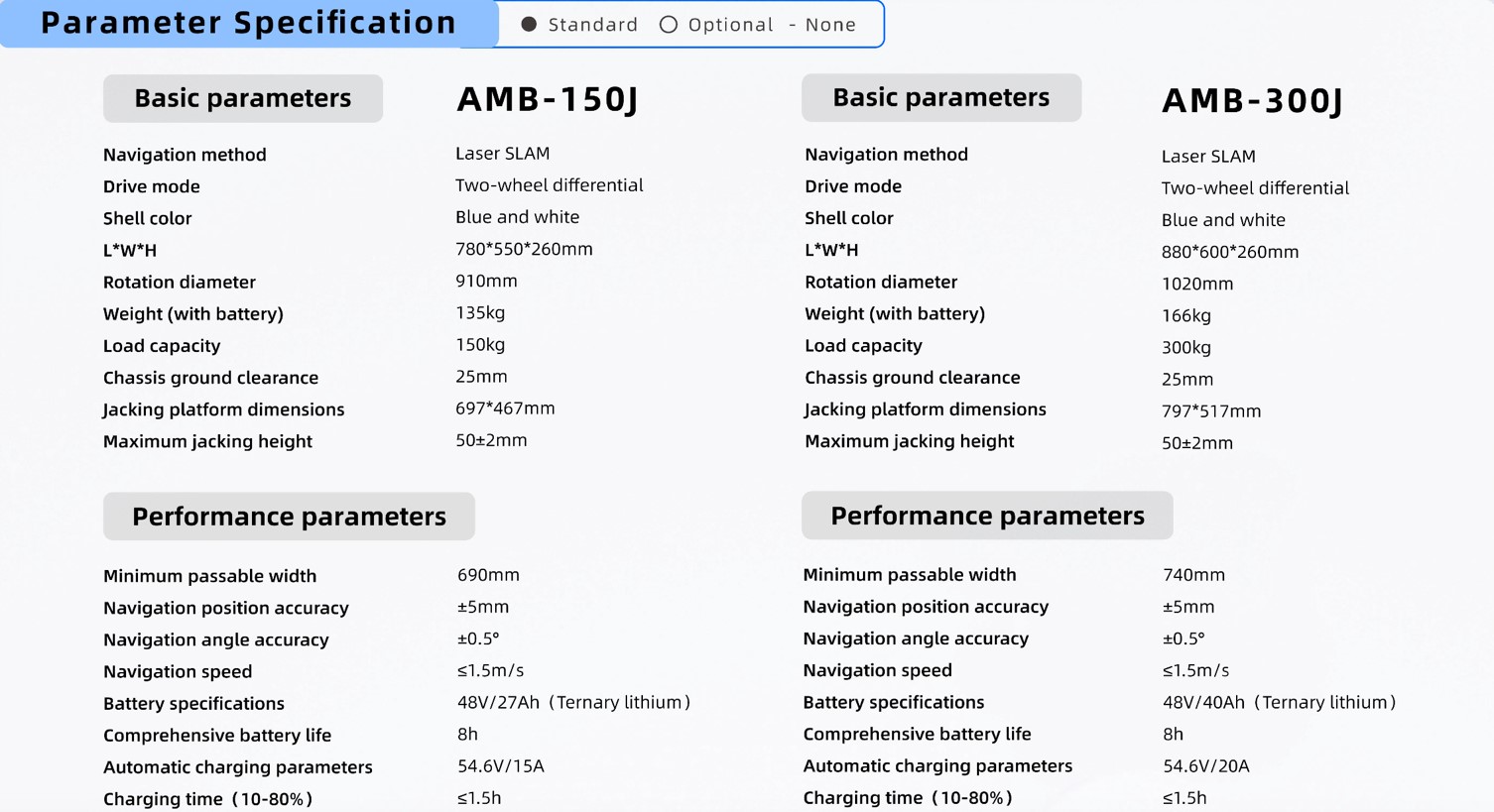
· capasiti llwyth: 150kg a 300kg
· uchder jacio uchaf: 50mm
·cywirdeb safle llywio: ±5mm
·cywirdeb ongl llywio: ±0.5°
● Nodweddion cyfoethog ar gael ar unrhyw adeg
Mae nodweddion safonol cynhwysfawr a rhagorol a nodweddion uwch cyfoethog ac ymarferol yn helpu cleientiaid i gyflawni logisteg ddeallus yn hawdd.
● Llwyfannau aml-fanyleb ar gael i'w hehangu
Darparu llwyfannau 150kg a 300kg i fodloni gofynion llwyth a lleoliad gwahanol ddiwydiannau. Gellir ei ddefnyddio hefyd gyda thrinwyr, rholeri, jacio, tyniant cudd, padio/tiltio, sgrin arddangos, ac ati i gyflawni nifer o gymwysiadau gydag un siasi.
● ±5 mm, effeithlon a chywir
Defnyddir algorithm SLAM laser i gyflawni lleoleiddio manwl gywir, gyda chywirdeb lleoli ailadroddus anadlewyrchol y laser o fewn ±5 mm, gan alluogi docio di-dor rhwng robotiaid symudol a bodau dynol, a llif effeithlon o gargo rhwng gwahanol bwyntiau. Nodyn: Mae gwerthoedd gwirioneddol yn dibynnu ar amodau amgylcheddol.
● Mordwyo sefydlog er mwyn diogelwch a dibynadwyedd
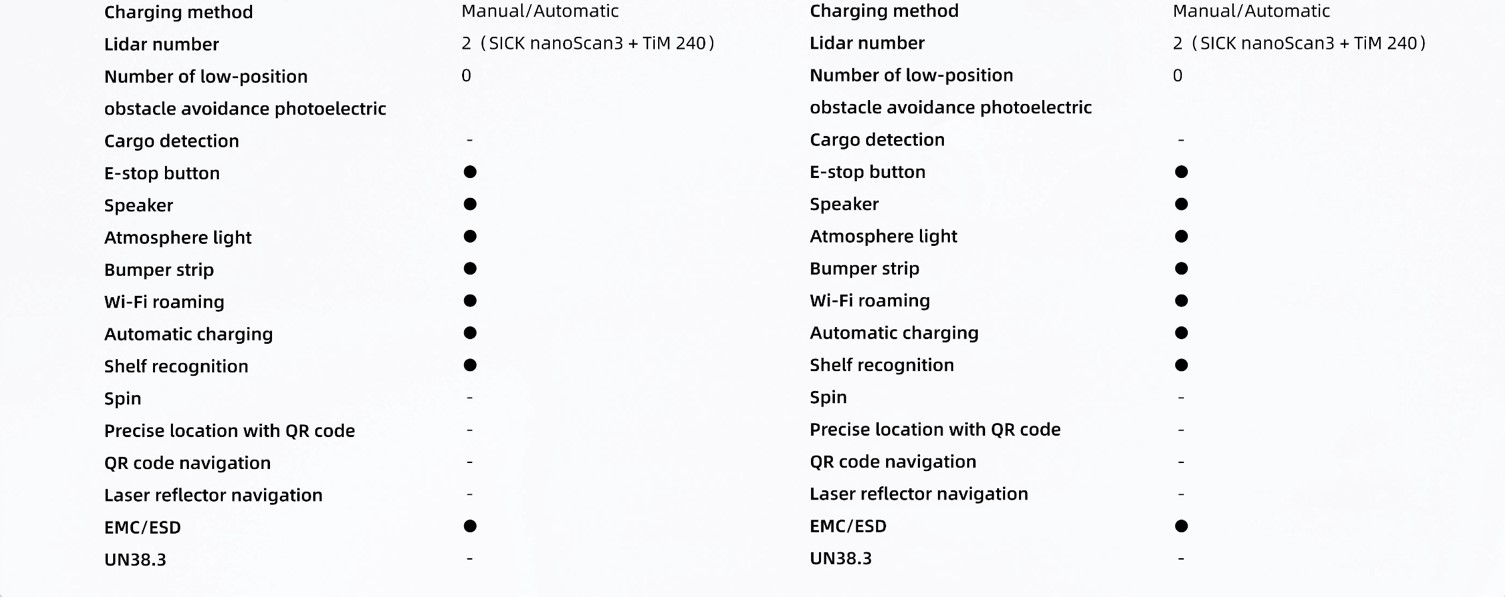
Mae llywio laser SLAM, llywio adlewyrchydd laser, llywio cod QR a dulliau llywio eraill wedi'u hintegreiddio'n berffaith ac yn cael eu newid yn ddi-dor i sicrhau gwaith sefydlog y robot symudol.
● Defnyddio hawdd a rheolaeth weladwy
Gall ystod lawn o feddalwedd ategol a systemau digidol wireddu gweithrediad, amserlennu a rheoli gwybodaeth robotiaid symudol yn hawdd, a chysylltu'n ddi-dor â system MES y ffatri i wireddu logisteg glyfar yn wirioneddol.
Cynhyrchion Cysylltiedig



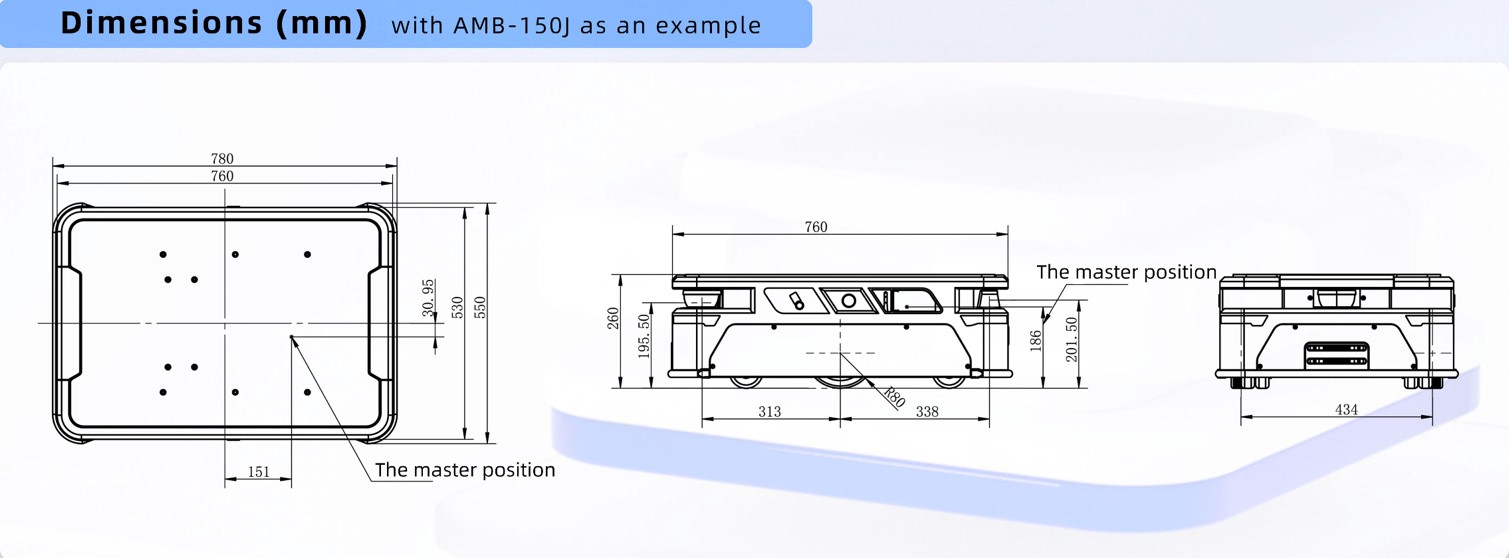
Paramedr Manyleb
Ein Busnes


Categorïau cynhyrchion
-

Gripper Robotig Trydanol 2 Fys Cyfochrog gyda...
-

Hitbot Zarm 2140c Crwydriadau Robot Diwydiannol 4 Echel...
-

Rob Diwydiannol 6 Echel Ansawdd Gweithgynhyrchu Tsieina ...
-

303ED Pris Gorau Robot Dewis a Gosod Diwydiant Llaw...
-

Robot Diwydiannol Cobot Llwyth Talu 5kg ar Werth Poeth...
-
Robot Cydweithredol 6-Echel 3kg ar Werth Poeth 2021...