CYFRES GRIPPER TRYDANOL HITBOT – Gripiwr Trydan Cylchdroi Z-ERG-20




Prif Gategori
Braich robot diwydiannol / Braich robot cydweithredol / Gafaelwr trydan / Gweithredwr deallus / Datrysiadau awtomeiddio
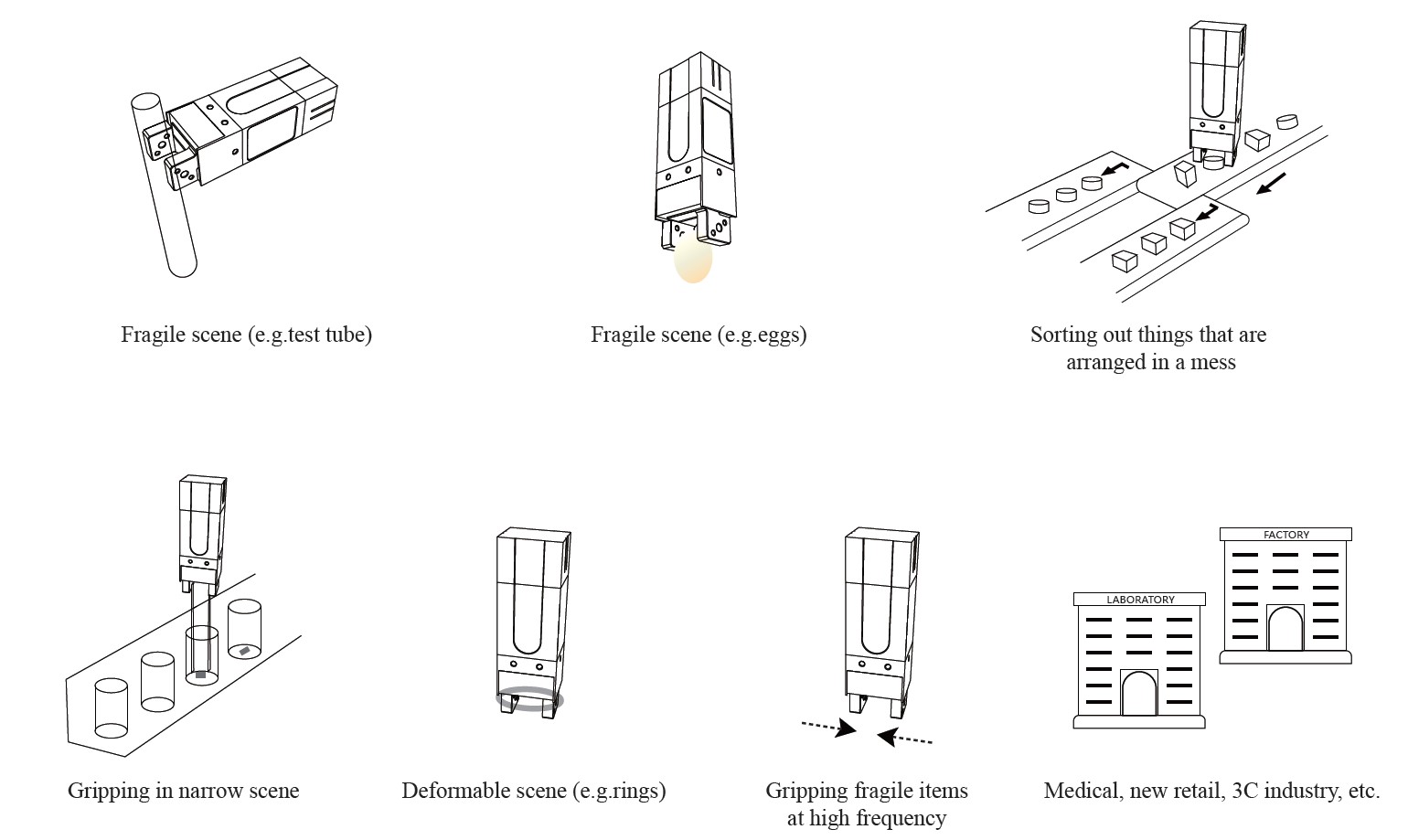
Cais
Mae gafaelwyr robot cyfres Z SCIC o ran maint bach gyda system servo adeiledig, sy'n ei gwneud hi'n bosibl cyflawni rheolaeth fanwl gywir ar gyflymder, safle a grym clampio. Bydd system afael arloesol SCIC ar gyfer atebion awtomeiddio yn caniatáu ichi agor posibiliadau newydd ar gyfer awtomeiddio tasgau na fyddech chi byth yn meddwl eu bod yn bosibl.
Nodwedd

· Cefnogi cylchdro anfeidrol a chylchdro cymharol, dim cylch llithro, cost cynnal a chadw isel
· Gellir rheoli grym cylchdro a gafael, safle a chyflymder yn fanwl gywir
· Bywyd gwasanaeth hir, cylchoedd lluosog, perfformiad gwell na gafaelydd preniwmatig
· Rheolydd adeiledig: meddiannaeth lle bach ac yn hawdd ei integreiddio
· Modd rheoli: cefnogi rheolaeth bws Modbus ac I/O



Paramedr Manyleb
Mae'r triniwr Z-ERG-20 yn hawdd i weithio gyda phobl ac mae'n cefnogi gafael meddal. Mae'r gafaelwr trydan wedi'i integreiddio'n dda ac mae ganddo lawer o fanteision:
●Cefnogaeth i gylchdroi anfeidrol a chylchdro cymharol, dim cylch llithro, cost cynnal a chadw isel.
●Gellir rheoli cylchdro, grym clampio, dril a chyflymder yn fanwl gywir.
●Oes hir: degau o filiynau o gylchoedd, yn well na chywasgwyr aer.
●Rheolydd adeiledig, i arbed lle, hawdd ei integreiddio.
●Modd rheoli: cefnogi rheolaeth Modbus a I/O.
| Rhif Model Z-ERG-20 | Paramedrau |
| Cyfanswm y strôc | 20mm addasadwy |
| Grym gafaelgar | 10-35N addasadwy |
| Ailadroddadwyedd | ±0.2mm |
| Pwysau gafael a argymhellir | ≤0.4kg |
| Modd trosglwyddo | Rac gêr + Canllaw llinol |
| Ailgyflenwi saim cydrannau symudol | Bob chwe mis neu 1 miliwn o symudiadau / amser |
| Amser symudiad strôc unffordd | 0.20e |
| Trorc uchaf cylchdroi | 0.3 Nm |
| Cyflymder uchaf cylchdroi | 240 RPM |
| Ystod cylchdroi | Cylchdro anfeidrol |
| Adlach cylchdroi | ±1° |
| Pwysau | 1.0kg |
| Dimensiynau | 54*54*141mm |
| Foltedd gweithredu | 24V ± 10% |
| Cerrynt graddedig | 1.5A |
| Cerrynt uchaf | 3A |
| Pŵer | 50W |
| Dosbarth amddiffyn | IP20 |
| Math o fodur | Modur servo |
| Ystod tymheredd gweithredu | 5-55 ℃ |
| Ystod lleithder gweithredu | RH35-80 (Dim rhew) |
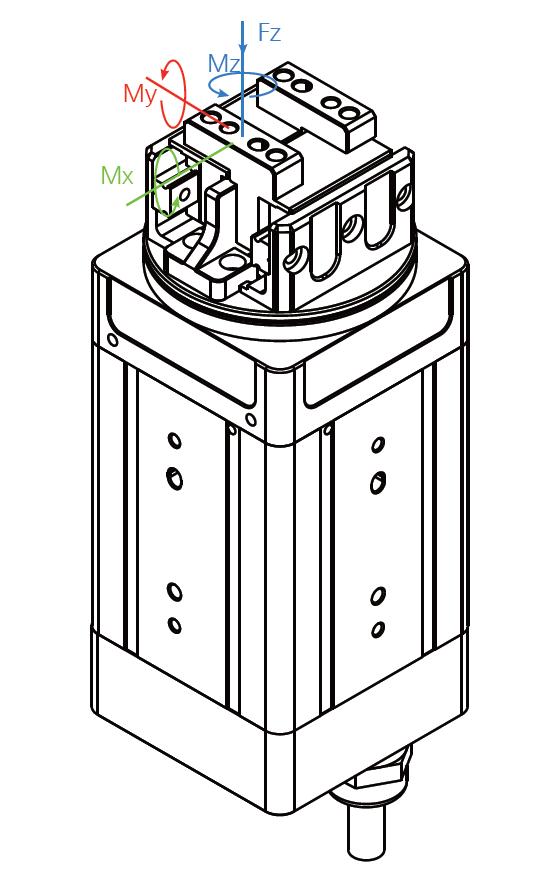
| Llwyth statig a ganiateir mewn cyfeiriad fertigol | |
| Fz: | 100N |
| Torque a ganiateir | |
| Mx: | 1.35 Nm |
| Fy: | 0.8 Nm |
| Mz: | 0.8 Nm |
Gwrthbwyso Canol Disgyrchiant Llwyth
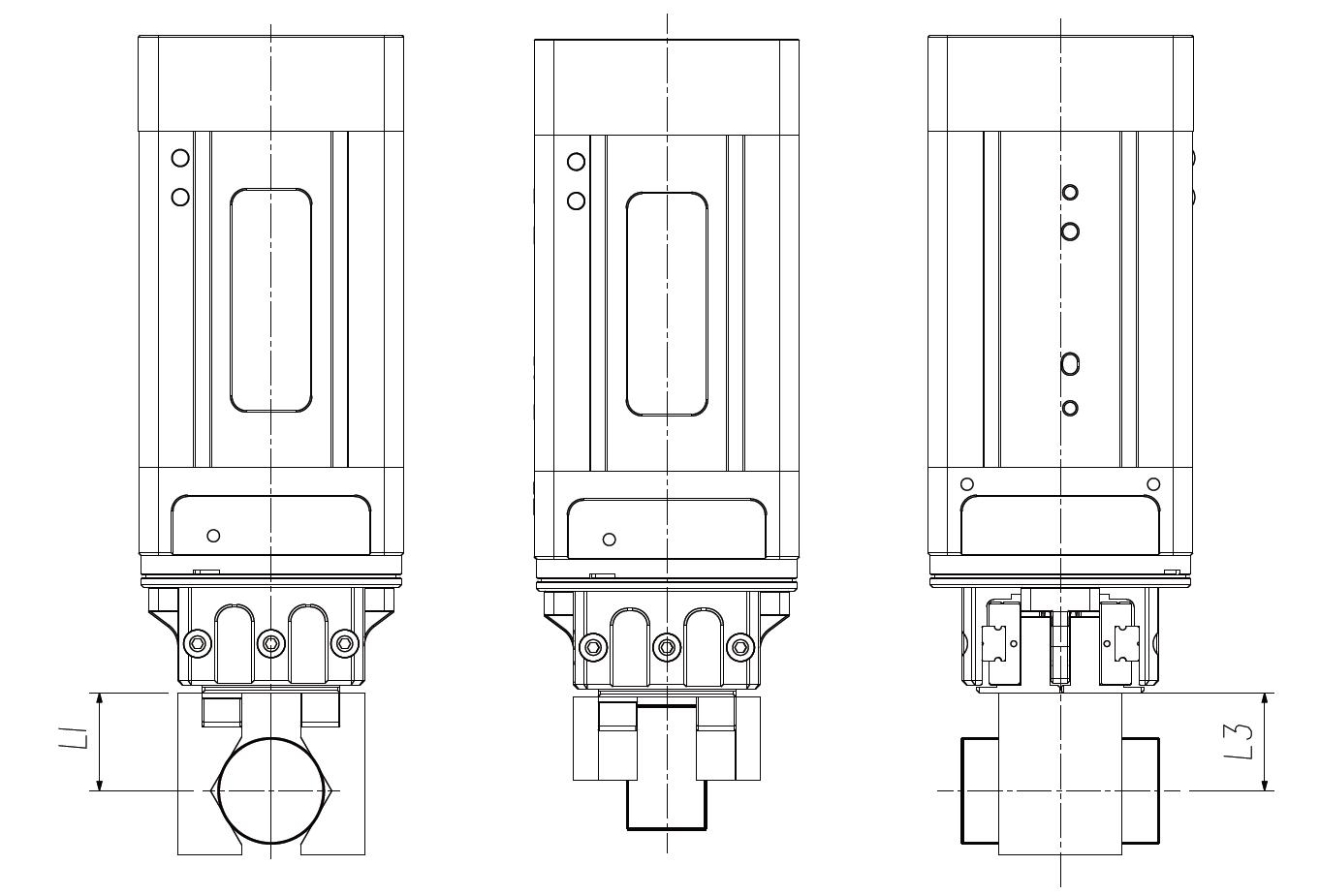
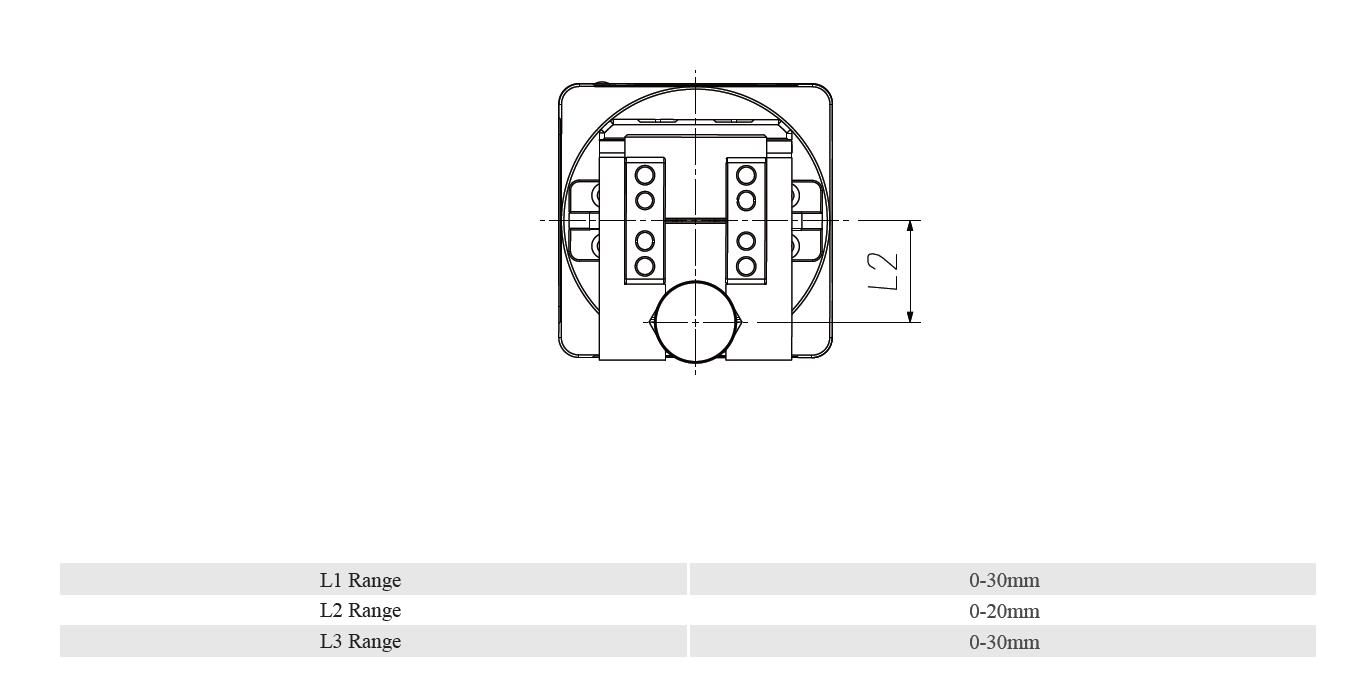
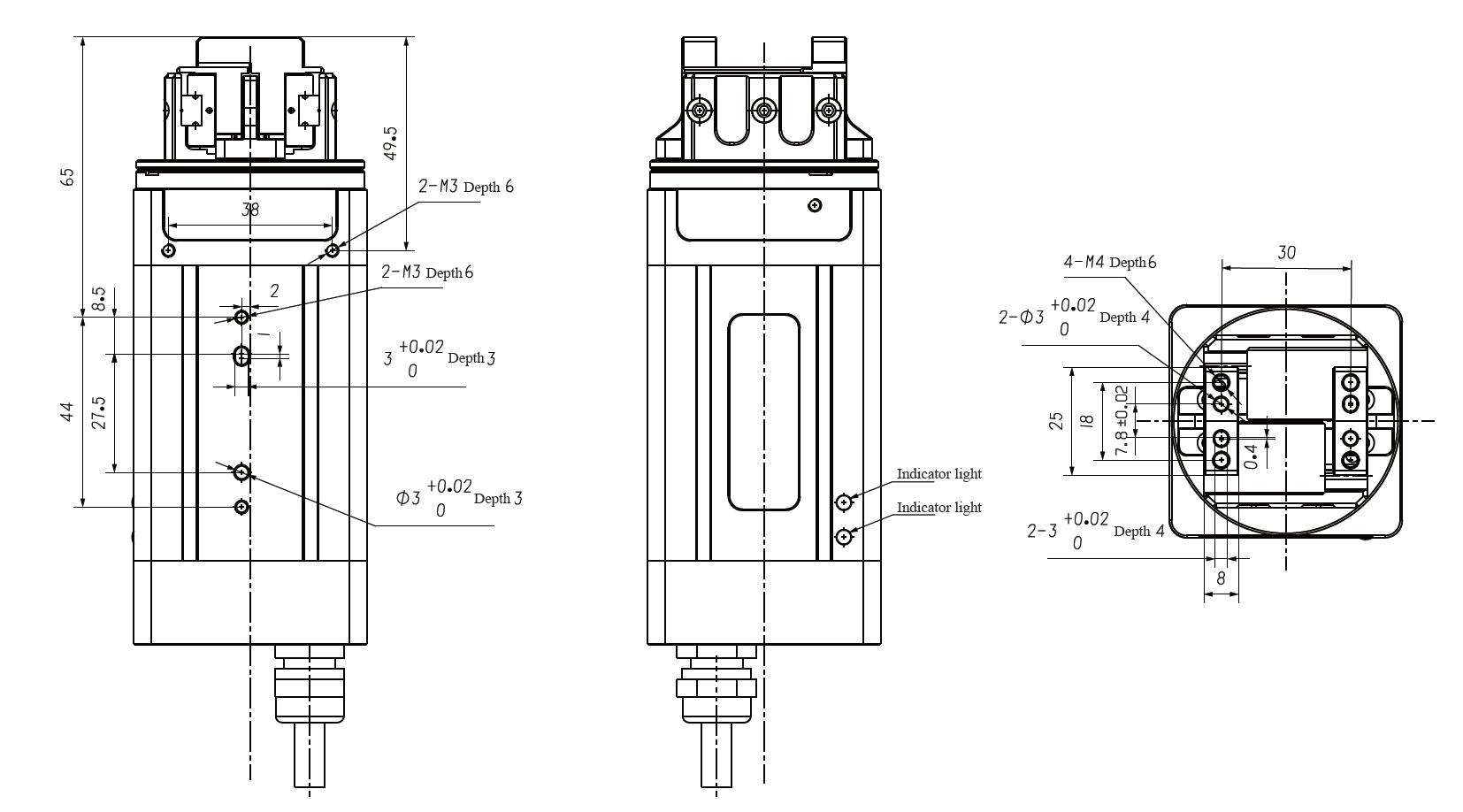
Diagram Gosod Dimensiwn
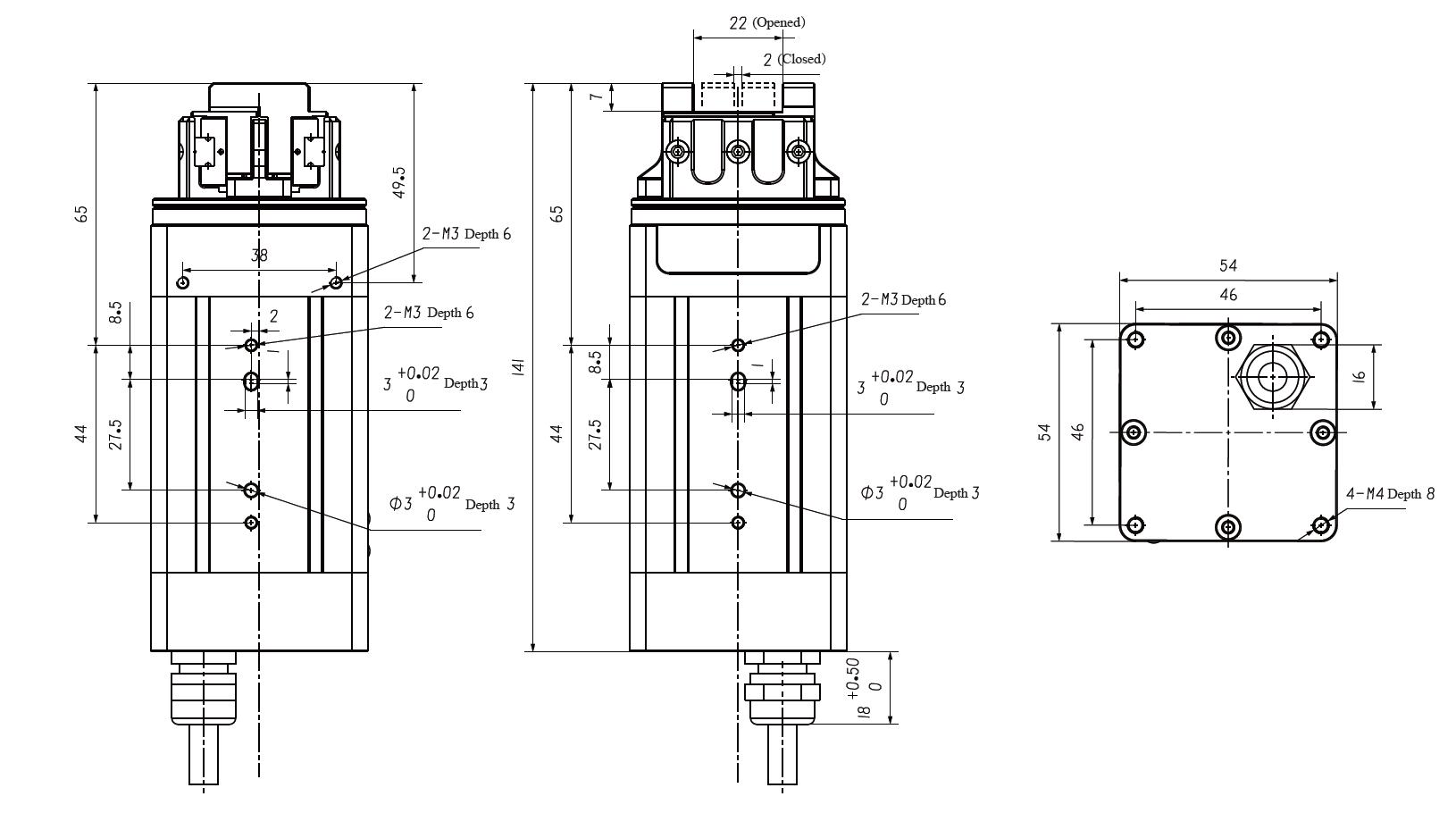
① Plwg awyrenneg pum craidd RKMV8-354 i RKMV8-354
② Mae strôc y gafaelydd trydan yn 20mm
③ Safle gosod, defnyddiwch ddau sgriw M6 i gysylltu â'r fflans ar ddiwedd braich robot UR
④ Safle gosod, safle gosod gosodiad (sgriw M6)
⑤ Safle gosod, safle gosod gosodiad (3 thwll pin silindrog)
Ein Busnes







